先端半導体向け超微細バンプ高さ計測センサの開発
水野 佑樹 Yuki Mizuno
石原 満宏 Mitsuhiro Ishihara
日名子 達也 Tatsuya Hinago
近年,生成AIや自動運転などの分野により,エレクトロニクス産業は急速に成長している。その成長には,半導体デバイスの性能向上が重要な役割を果たしており,回路の高密度化や複数のICチップ搭載による多機能化が進められている。しかし,回路の高密度化は,回路間を接続するバンプを微細化させ,それに伴いバンプの形成不良による半導体パッケージの不良リスクを高める。東光高岳では,ICチップ搭載の前工程でバンプの高さ不良を検出可能な,超微細バンプ向け計測センサ10300を開発した。今回は,5.7 μm径,10 μmピッチの球状バンプの計測事例とともに高精度計測の取り組みについて報告する。
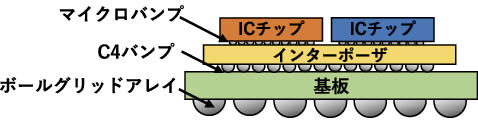
1 はじめに超微細バンプ向け計測センサ(以下,三次元センサ)は,物体の高さを計測する機能を有する。東光高岳では,三次元センサを搭載した三次元検査装置を製品展開しており,用途の一例として,半導体パッケージ内部のバンプと呼ばれる電極の高さを検査している(図1 )。
図1 半導体パッケージの構造例
図1 の半導体パッケージは,近年の生成AIの急速な普及や自動運転実用化に対応するために,半導体デバイスの性能向上を実現する手段として開発されたものである。構造の特徴として,複数のICチップを高密度配線で接続し,1パッケージ内に収めたアドバンストパッケージ構造が採用されている。アドバンストパッケージは,パッケージに収めるICチップの数を増加させることによって性能向上を図るため,接続配線の微細化とパッケージサイズの大型化が同時に進められている。配線の微細化に伴い,配線の接続に使用されるバンプの微細化も進行しており,既に10 μm以下の超微細バンプピッチ構造の半導体基板の製品開発も進められている。そして,パッケージサイズの大型化によって,基板上に載るICチップの数は増加し,結果としてパッケージあたりの接続バンプ数は,爆発的に増大している。このため,パッケージの量産に向けたバンプ検査装置では,増加するバンプ数に対応可能な高速性とバンプの微細化に対応した高精度な高さ検査能力が求められている。
本稿では,三次元センサの原理や構造を交えて,これらの要求に応える新たな三次元センサを開発したことを報告する。
2 10300三次元センサの開発2.1 共焦点方式の三次元計測の原理
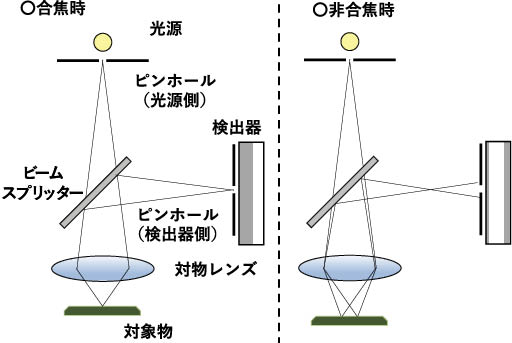
三次元センサは,光を利用して対象物の形状を三次元的に計測する物である。計測原理は,光計測の一つである共焦点方式を採用している。図2 に共焦点方式の計測原理を示す。光源側ピンホールから射出された光が,レンズを通過して,対象物に焦点を結ぶ(合焦)時,反射光が光学的に同じ位置にある検出器側ピンホールに焦点を結ぶ一方で,対象物への焦点を結ぶ度合いによって,検出器側ピンホールを通過できる光の量が変化し,検出器の出力が変化する。この特徴を共焦点効果と呼ぶことにすると,この共焦点効果を利用して,対象物の高さを計測することが可能になる。実際の計測では,対象物を光軸方向に駆動する,あるいは,レンズを駆動することで,サンプリング位置における検出器の出力値を取得し,値が最大となる位置を検出することで高さ計測を行っている。三次元計測を実現するためには,さらにXY方向にもスキャニングする必要があり,一般的には計測時間がかかる方式である。
図2 共焦点方式の三次元計測の原理
2.2 共焦点撮像系
前節の課題を解決して高速化を図るために,多数のピンホールを二次元に配列したピンホールアレイ(以下,PHA)を採用することで,XY方向のスキャニングする必要無くその領域を画像として情報を取得できる共焦点撮像系を構成した。PHAを用いる場合,PHA上の各ピンホールの間隔は,共焦点効果を得るために,一定の距離を離して配置する必要がある。ただし,このままでは,ピンホール以外のマスクされた部分は不感領域となり,分解能が著しく落ちてしまう問題が生じる。そこでPHAをリニアモータステージへ搭載し,一方向へ走査することで,マスク領域で取得できなかった対象物の情報を取得可能とし,高解像度の撮像を実現している。リニア走査の詳細については,参考文献(1)を参照されたい。
2.3 従来の光学的焦点移動機構
共焦点効果を得るためには,光軸方向に異なる位置でサンプリングする必要があり,これを光学的に実現する機構を光学的焦点移動機構と呼んでいる。従来当社では,光学的焦点移動機構として円板方式を採用していた。
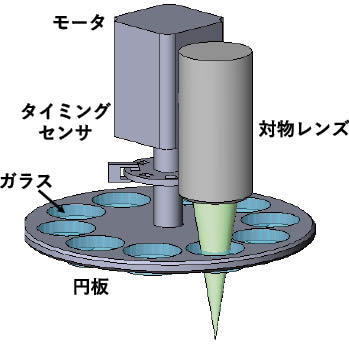
円板方式による焦点移動機構の構造を図3 に示す。円板の円周上には,厚みの異なる平行平面ガラスが並べられており,すべての平行平面ガラスの中心が対物レンズの光軸を横切るように円板を連続回転させると,ガラスの厚さに比例して対物レンズの焦点位置が移動する。この特徴を利用することで,高速な光軸方向の走査を実現していた。しかしながら,円板への平行平面ガラスの取付け姿勢誤差(傾き)が完全には取り切れず,入力した画像に横ずれが発生して計測に誤差を生じさせる問題があることがわかっている。現在開発している三次元センサでは超微細バンプを計測する必要があるため,この横ずれ誤差の影響は大きいことは間違いなく,新たな光学的焦点移動機構を開発することとなった。
図3 従来の光学的焦点移動機構の構造
2.4 新規の光学的焦点移動機構
三次元センサの開発に当たり,新たな光学的焦点移動機構を開発した。焦点移動の機構部をリニアモータステージへ搭載することで,光軸方向の焦点移動が安定し,円板方式で問題となっていた平行平面ガラスの取付け姿勢誤差や回転による振動の影響を解決している。
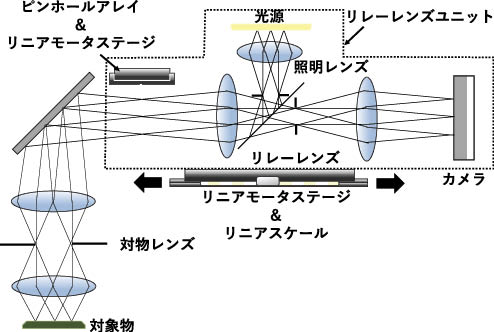
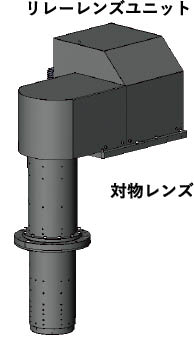
新たな光学的焦点移動機構の模式図を図4 に示す。PHA部とリレーレンズ系をひとまとまりとしたユニットを,一軸のリニアモータステージ上に配置し,リニアモータステージの移動により光軸方向の離散的なサンプリング(光学的焦点移動)を実現した。リニアモータステージには,リニアスケールが取り付けられており,リニアスケールの座標によって,検出器であるカメラにトリガーが発せられ,正確な位置での画像取得が可能となっている。
本機構の特徴は,円板方式では不可能であった,画像取得ピッチと高さ計測の範囲を自由に変更できることである。これにより,計測対象に応じた,最適な精度と速度への調整が可能となった。
図4 新規光学的焦点移動機構の模式図
2.5 三次元センサの仕様・構造
今回開発した10300三次元センサ(型式:SCS-10330R2)の外観図を図5 ,仕様を表1 に示す。SCS-10330R2は,超微細バンプの計測を可能とするためにXY分解能1.11μmと高解像度化している一方で,パッケージの量産に向けたバンプ検査機への適用を前提に,高速性を重視して9×9mmの広視野化も同時に実現している。これにより,高解像度でありながら12インチウェーハ検査5WPH(Wafer Per Hour)の高速検査を可能としている。計測の要である対物レンズに対しては,最終調整および評価用にシャックハルトマン波面収差計測機注1) を開発し,リアルタイムに収差状況を把握しながらの光学調整を可能とし,安定した収差注2) 性能のレンズ製作を実現した。
図5 SCS-10330R2の外観図
表1 SCS-10330R2の仕様
項目
SCS-10330R2
光計測方式
共焦点
視野サイズ
約9×9mm
XY分解能
1.11μm
Z分解能
0.04μm
Z計測範囲
最大300μm
スループット
※条件:12インチウェーハの
5WPH
3 SCS-10330R2の検証結果3.1 超微細バンプの計測結果一例
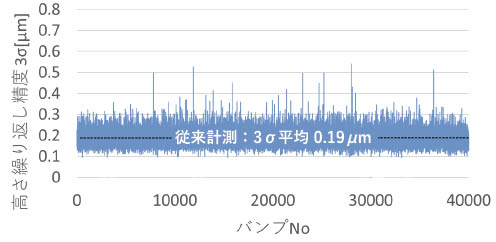
超微細バンプの高さ計測の繰り返し精度評価の結果を図6 に示す。計測対象のバンプは,5.7μm径,10μmピッチの球状バンプ40,000個である。基板からバンプ頂点までの高さを120回繰り返し計測し,バンプ毎に計測値のばらつきを表す3σ値をグラフ化している。各バンプの繰り返し精度の平均は約0.19μmであり,高精度に計測できていることがわかる。
図6 ϕ5.7μm球状バンプの繰り返し精度
3.2 超微細バンプの計測課題
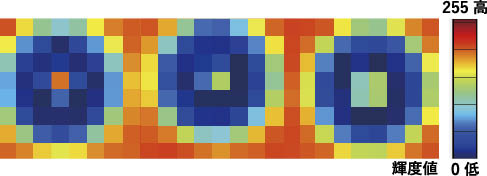
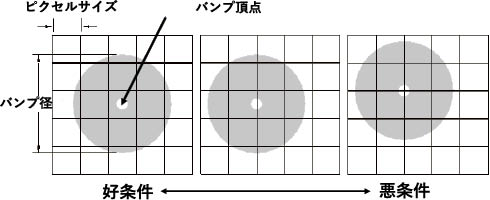
5.7μm径の球状バンプを計測した時の全焦点輝度画像を図7 に示す。全焦点輝度画像とは,立体物の形状に対し,すべての高さで焦点が合っている画像であり,共焦点計測の結果として得られる画像である。バンプ頂点に注目すると,1画素で光るものもあれば,数画素で光るものも存在し,この見え方によって,計測結果のばらつきに影響があることが判明しており,これを画素割れ問題と称している。この現象は,バンプ頂点と検出器の画素の位置関係で発生している。(図8 )。そして,バンプが微細であるほど本現象は顕著となる。
図7 ϕ5.7μm球状バンプの全焦点輝度画像
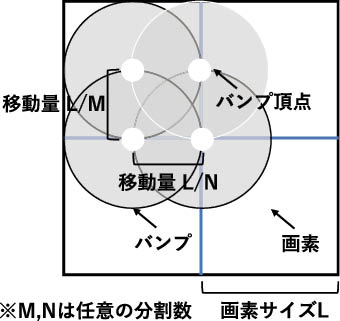
図8 バンプと画素の位置関係を表す図
3.3 高精度計測処理
上記画素割れ問題への対策として,サブピクセルシフト(図9 )という高精度計測処理方法がある。複数回の計測毎に画素より微小な量(サブピクセル量)だけ位置をシフトさせることで画素割れによる計測のばらつきを平均化することが可能になる。図9 では,移動量を画素の半分とし,X方向に2回,Y方向に2回位置を変えて計測する例を示している。さらに複数回計測して平均を取ることで,中心極限定理注3) により,その平均値がもつ標準偏差はσ /
n
(n:計測回数)となり,繰り返し精度も向上させることが可能である。
図9 サブピクセルシフトの模式図
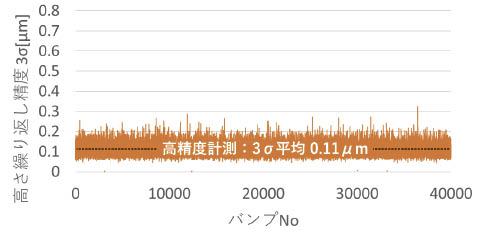
本処理よりバンプ高さ計測を実施した結果を図10 に示す。使用したサンプルは,前述の計測例と同じものである。4回のサブピクセルシフトを1周期として30周期(計測としては120回)の計測を行いその平均値の繰り返し精度3σをグラフ化した。本処理を行うことで,各バンプの繰り返し精度の平均が0.11 μmと高精度化が実現できている。図6 と比べてみると,異常値のような部分が少なくなり,画素割れによるばらつきが改善されていることがわかる。
図10 高精度計測処理による繰り返し精度
4 おわりに新たに開発した三次元センサSCS-10330R2の構造と超微細バンプの繰り返し精度の評価結果を述べた。SCS-10330R2は10μmピッチレベルの超微細バンプの計測が可能であり,かつ5WPHの高速性を有していることから,今後増えてくると考えられる大型のアドバンストパッケージに向けたバンプ検査が可能になると考えている。今後は,さらなる高精度化,高速化を進めていく所存である。
■参考文献
(1)石原,日名子,井上,水野:“リニア走査型共焦点光学系による高速マイクロバンプ高さ計測”エレクトロニクス実装学術講演大会講演論文集,Vol.29,No.17E5-1,(2015)
(2)水野,石原,日名子:“超微細バンプの計測を可能とする三次元センサの開発”エレクトロニクス実装学会春季公演大会プログラム,Vol.39,No.13C4-4,(2025)
■語句説明
注1) シャックハルトマン波面収差計測機:光学系における光学性能の指標となる波面の歪みや収差を測定する計測機。計測機内にマイクロレンズアレイが配置されており,各マイクロレンズによって波面の一部が焦点面にスポットとして形成され,そのずれを解析することで,波面の歪みが計算できる。
注2) 収差:光学系を通過した光が,理想的な一点に集光されない光線のズレのことを指す。
注3) 中心極限定理:大きなサンプルサイズであれば,個々のデータの分布に関わらず,標本平均の分布が正規分布に近づくことを示す統計理論のこと。
水野 佑樹
石原 満宏
日名子 達也